Understand the speed of a bicycle, by analyzing forces and calculating power
This article shows how to calculate the power needed for a bicycle to move at a given speed. Equations are explained from first principles, considering the forces acting on a bicycle. Typical values are given for all the required parameters. The approach also allows you to calculate speed if you know power, although it’s a bit more difficult that way around. The focus in this article is on the relationship between power and steady state speed, although this approach also provides the upper bound for analysis of acceleration.
Physics of bicycle speed
Applying basic physics to cycling, the equation F=ma (force = mass x acceleration), may be expressed as
FP – FR = m a
where FP is the propulsive force and FR is the sum of all resistance forces.
Assuming a constant speed has been reached, acceleration is zero and the above equation simply becomes FP = FR. Multiplying this by velocity, v, converts the propulsive force into the propulsive power PP.
PP = v FR
PP may be replaced by the input power Pin generated by the cyclist and the efficiency of the transmission system η. This gives a general equation relating the stead state speed of a bicycle to the power produced by the rider:
Pin η = v FR
The total resistance to motion is actually made up of several separate resistance forces:
- Fg, resistance due to gravity (when riding on a slope)
- FA, air resistance to forward motion
- FR, rolling resistance
- FRB, wheel bearing resistance
- FB, bump resistance
- FW, air resistance to the rotation of the wheels
These resistance forces are sometimes represented differently, but the basic forces remain the same.
Resistance Due to Gravity

Gravity acts on the combined mass of bike and rider, causing a downward force, weight. If the ground is not horizontal, then a component of this force will act to resist forward motion. If the slope is specified as an angle, then the gravity force, mg, is multiplied by the cosine of the angle. Typically, the slope will be specified as a gradient, G, so that the resistance due to gravity is given by
Fg = m g sin( arctan(G) )
where m is the combined mass of bike and rider, g is the acceleration due to gravity (9.81 m/s) and G is the gradient of the slope. The steepest roads have gradients of about 30%, but these are very rare. A 12% gradient is normally considered to be very steep. You can easily check gradients on your normal routes using the free Google Earth Pro app. This video shows you how, using the Elevation Profile feature.
Fg is the same at any speed, even when stationary, it’s just the force pulling you down the slope of the hill.
Air Resistance to Forward Motion
Air resistance, or aerodynamic drag, is given by the standard equation:
FA = ½ Cd A ρ vA2
where Cd is the drag coefficient, A is the frontal area, ρ is the density of the air, vA is the air velocity in the direction the bike is travelling. Af is sometimes used to make it clear that the drag coefficient is based on the frontal area, this is because aerofoil sections are often specified using different measures of surface area.
Since changes to the shape of a bike or the position of the rider will change both the drag coefficient and the frontal area, it is generally more convenient to consider Cd A as a single parameter, the drag area. This can be found by testing. For example, in a wind tunnel, the force FA and wind velocity v are measured. Measurements are also taken of the air pressure, temperature and humidity, these are used to calculate the air density ρ. The drag area is then calculated by rearranging the standard air resistance equation:
Cd A = 2 FA / ρ vA2
It is generally not necessary to accurately measure the frontal area and determine Cd independently. The drag area is sufficient to calculate the drag force at any speed and in any environment.
It is important to note that Cd actually varies with velocity, although it is generally acceptable to treat it as a constant over a small range of velocities. As the air velocity increases, the airflow changes in significant ways such as becoming turbulent and laminar flow separating. This can lead to quite sudden changes in Cd. The critical parameter which affects the drag area, for a given shape, is the Reynolds number, which depends on both velocity and the size of the object. The main parts of a bicycle and cyclist are approximately cylindrical with diameters ranging from 1 mm (spokes) up to about 300 mm (body of cyclist), at typical cycling speeds this results in Reynolds numbers in the approximate range of 103 to 105. Over this range, the coefficient of drag for a cylinder is approximately constant. However, at higher speeds the coefficient changes significantly. Additionally, for aerofoil sections, the drag coefficient varies significantly over this range. For more streamlined bicycles there may, therefore, be value in evaluating the drag area as a function of velocity.
Wind complicates things in two ways. Firstly, a head wind means that the air velocity vA is not the same as the bikes velocity vG. Secondly, a cross wind changes the drag area of the bike since the air flows over the bike and rider in a different direction. Wind may have any direction relative to the path of the bicycle. The first step in considering these issues is to separate the wind velocity into two components. The headwind component is tangential to the bicycle’s path and has velocity vWTan and the crosswind component is normal to the bicycle’s path and has velocity vWNor. It is then possible to calculate the air velocity from the bike’s velocity and the headwind component:
vA = vG + vWTan
The yaw angle is the angle between the bicycle’s path and the direction of airflow over the bicycle. It is calculated:
Yaw Angle = arctan(vWNor / vA)
When measuring drag in a wind tunnel, it should be measured at different yaw angles. It is then possible to interpolate between the measured angles to determine Cd A for any yaw angle.
Sometimes, a further simplification is made in which Cd A is combined with the factor ½ and the density of air to give a single aerodynamic drag factor kA, given by
kA = ½ Cd A ρ
This may be convenient but it can also mistakenly create the impression that air density is relatively constant. This is not the case. Under extreme conditions air density could be as high as 1.5 kg/m3 (below sea level, with dry air at -30 C) or as low as 0.9 kg/m3 (at 1,000m elevation with a temperature of 50 C and 100 percent humidity). On the highest road in the world the density could even get as low as 0.7 kg/m3. Even under normal conditions the density can vary between about 1.1 and 1.3 kg/m3.
Air Resistance to Wheel Rotation
For wind tunnel tests, a bicycle should be mounted on rollers so that its wheels are rotating at the ground speed. This is because the movement of the wheels changes the flow of air over the bike and rider. The force measured in the wind tunnel is, however, only the force of the air pushing backwards on the bike and rider. The air’s resistance to the rotation of the wheels, caused mostly by the spokes passing through the air, is not measured. This resistance has its own drag area which may be measured by rotating the wheels in the air. The air resistance to wheel rotation is given by:
FW = ½ Cd A ρ vG2
Note that ground velocity should probably be used here. It is clear that if a tail wind exactly matches the speed of the bicycle, so that the air velocity is zero, there is still a resistance to the rotation of the wheels. This demonstrates that the use of air velocity, as in some sources, is not correct. However, there may well be some effect caused by the air velocity which would not be detected by rotating the wheel in still air. This issue has not be fully explored in the literature.
It should also be noted that if a coast-down, or similar, test is used to determine the drag area, then this will produce a combined drag area, for the resistance to both forward motion of the bicycle and rotation of the wheels. In this case, it is difficult to deal with the yaw angle effects fully.
Rolling Resistance
As a wheel rolls over the ground, both the wheel and the ground deform slightly. Some of this deformation is elastic and so the energy is recovered. The inelastic deformation generates heat and dissipates power. A solid steel wheel on a steel rail has very little inelastic deformation and therefore the rolling resistance is very low. The air within a pneumatic tire also has good energy recovery. However, some energy is still lost by friction within the tire casing. When riding over soft ground significant energy is also dissipated by the ground itself.
Small inertial loads, as the wheel passes the small bumps of a rough surface, may also be included as part of rolling resistance, although strictly this is bump resistance, dealt with in the next section.
Reliable analytical models of rolling resistance do not exist. Instead, rolling resistance is measured for a given tire, road surface and inflation pressure. The rolling resistance is normally modelled as a single dimensionless coefficient of rolling resistance CR which is the ratio of the normal to tangential force on the tires. The normal force is the combined weight of the bike and rider pushing down against the road. On a perfectly horizontal road this is simple mg. The tangential force is the rolling resistance. On a hill with gradient G the rolling resistance is given by:
FR = CR m g cos( arctan(G) )
Bump Resistance
The small bumps, which are continuously encountered due to the roughness of the road surface, are normally included in the rolling resistance. Large smooth bumps may not cause any resistance. The wheel may roll smoothly up one side converting kinetic energy into potential energy. When the wheel rolls down the other side the potential energy is converted back into kinetic energy with almost complete energy recovery. Larger and steeper bumps may cause a significant resistance which requires consideration separate to rolling resistance. For example, curbs and potholes on the road, or rocks and roots off-road.
When a wheel encounters a square edged bump, the angle of force depends on the size of the bump and the size of the wheel. If a square edges bump is taller than the wheel radius, then the wheel may be stopped completely. This frequently happens with the small wheels of roller skates and skateboards. If suspension allows the wheel to move backwards, relative to the vehicle, before it moves upwards, then even in such an extreme case it may be possible for the wheel to roll over the bump.
The lower the mass which must be lifted over a bump, the lower the bump resistance. For this reason, pneumatic tires are excellent at minimizing bump resistance since only a small portion of the tire casing, weighting a few grams, is lifted over most bumps. For bumps too large to be absorbed by pneumatic tires, suspension means that only the wheel and suspension arm must be lifted over the bump, not the whole vehicle.
There is no analytical or experimental way of determining the general bump resistance. A significant challenge is that the resistance greatly depends on the response of the rider.
Wheel Bearing Resistance
Wheel bearing resistance is typically included with rolling resistance, although it is a separate resistance which behaves differently. It has been shown that bearings produce a torque which varies linearly with both normal force and rotational velocity Mai, Poland, and Jenkins (1991). However, since bearing resistance is relatively small, treating it as a component of rolling resistance appears to produce negligible errors. In the most accurate tests to date, there was no velocity dependent component of bearing resistance included, with the bearing resistance included within the rolling resistance.
Experimental Validation of Bicycle Power Equations
This approach was first demonstrated to predict the power of road cyclists by approximately 3% (Martin et al, 1998). These tests used wind tunnel tests to determine CdA for a range of yaw angles and independent tests to determine the air resistance to wheel rotation, but reference values were used for rolling and wheel bearing resistances. Considerably higher accuracy has been achieved by Fitton & Symons (2018) by considering kinetic energy changes and accurately modelling changes in rolling resistance with cornering.
Grouping Resistances Together
Resistances may be grouped together for a number of reasons. Sometimes this is done to just to present a simpler model. For example bearing resistance is very small and is often included with rolling resistance. One very good reason for grouping resistances is when a coast-down test is performed. A cost down test involves recording the time it takes for a bike to decelerate from some known speed, without pedaling, braking or turning. Deceleration is caused by the resistance forces, allowing them to be determined. Deceleration can be attributed to individual resistance factors by considering how they vary with velocity. The test track gradient is measured and the calculated resistance due to gravity is removed first. The constant force, which does not vary with velocity is then attributed to rolling resistance, although bearing resistance and possibly bump resistance will also be included. The remaining force, which will vary with the square of velocity, is attributed to air resistance. However, this is not the same air resistance as would be measured in a wind tunnel since it includes both the air resistance to forward motion and the air resistance to the rotation of the wheels. A more general way of expressing these forces is as the zeroth order forces and second order forces, referring to the power of velocity with which they vary. In theory, it would also be possible to identify first order forces, which may include the velocity dependent component of bearing friction. In practice, coast-down tests are not accurate enough to detect such effects. Therefore, coast-down tests determine two resistance parameters.
Calculating the Power Required to Achieve a Given Speed
The first step in calculating power is to determine resistance coefficients. In the simplest case, this would mean a single drag area and a single rolling resistance coefficient. The total power required to overcome each resistance force would then be calculated and the sum of these would be the total power required.
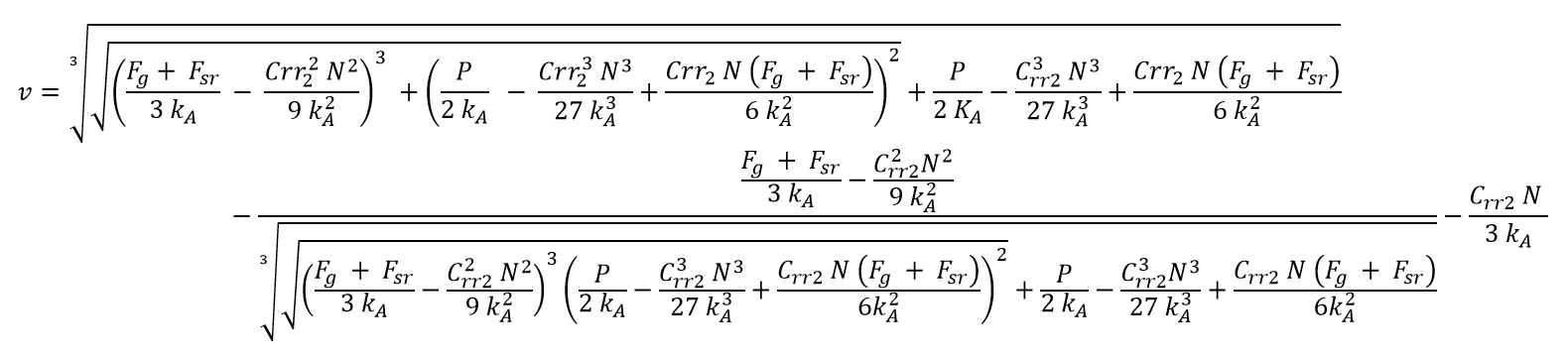
Calculating Speed for Known Power
It is possible to calculate the bicycle velocity, for a given input power, by rearranging the equation for power. To do this, the resistance forces, which are dependent on velocity, must first be substituted into the power equation. Resistance forces which are not dependent on velocity may continue to be represented as individual parameters. When the resulting equation is rearranged to make velocity the subject, it becomes very complex. This means that it is of little intuitive value and it is often more useful to simply view a graph of power against velocity. However, for computational analysis it can make sense to use the equation in this form. An example is given below: