This strange-looking bicycle won’t ever enter production. It’s simply a test rig used to try different riding positions and steering geometries. When designing a folding bike, it can be easier to achieve a compact and convenient fold if you don’t stick to the conventional full-sized bicycle geometry. We will be inviting our product test group to try riding it in different configurations to see how different people feel about different riding positions. If you’d like to give it a try, you can sign-up for the test group.
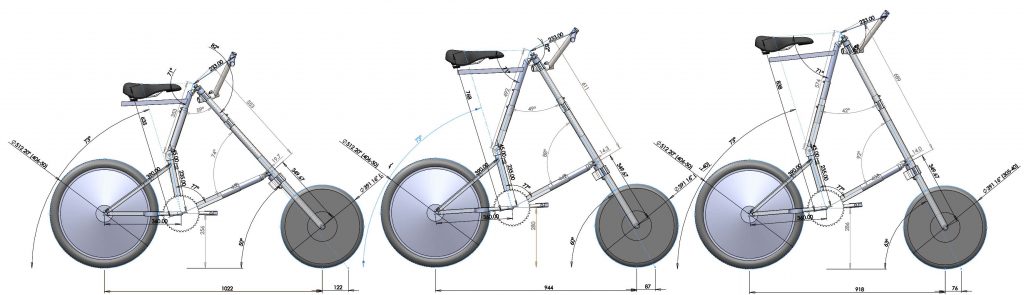
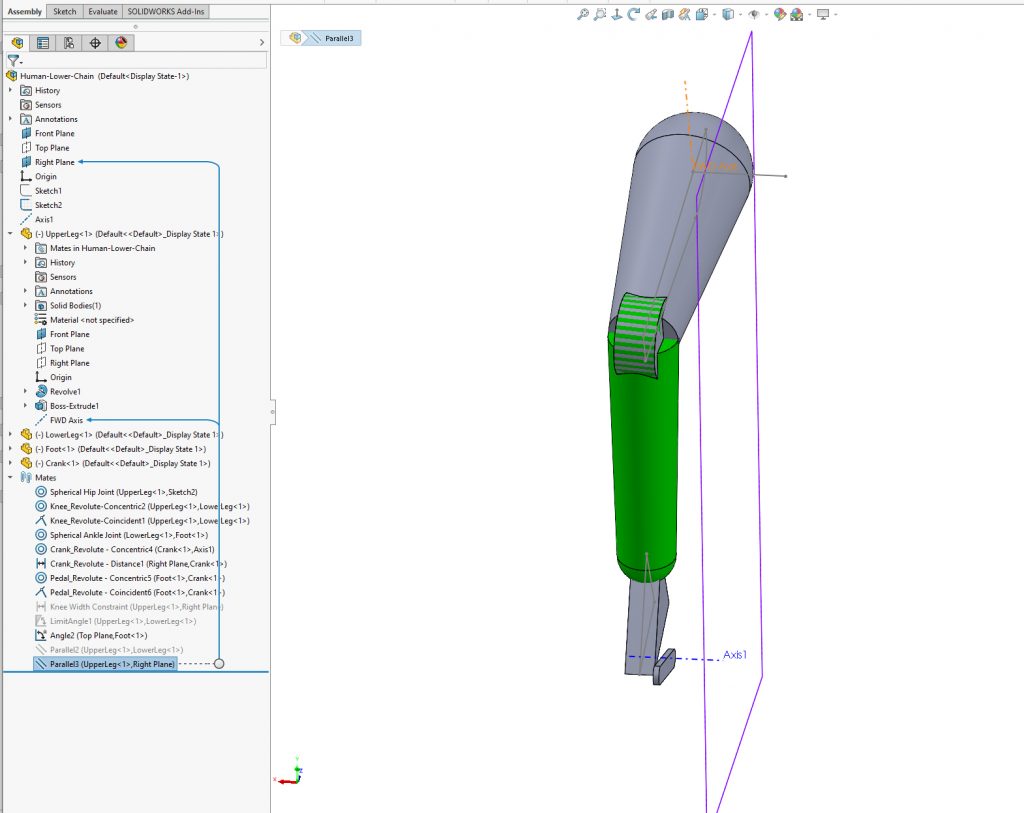
The main frame of this test bike forms a triangle, with each side telescopic. This allows the saddle height, steering angle, and wheelbase to be independently adjusted.
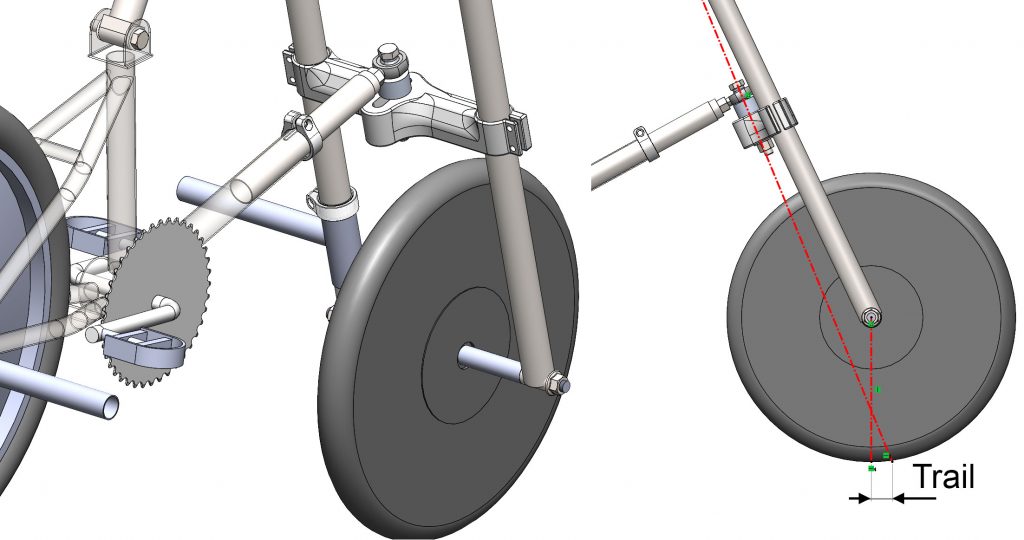
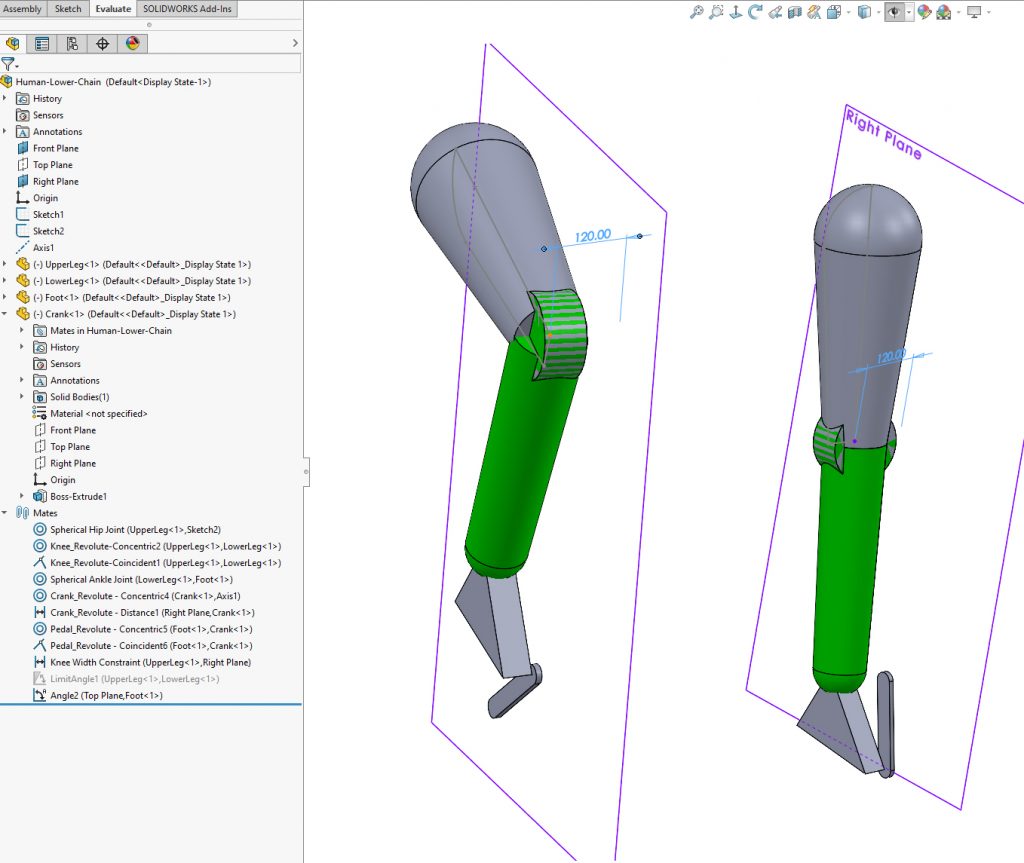
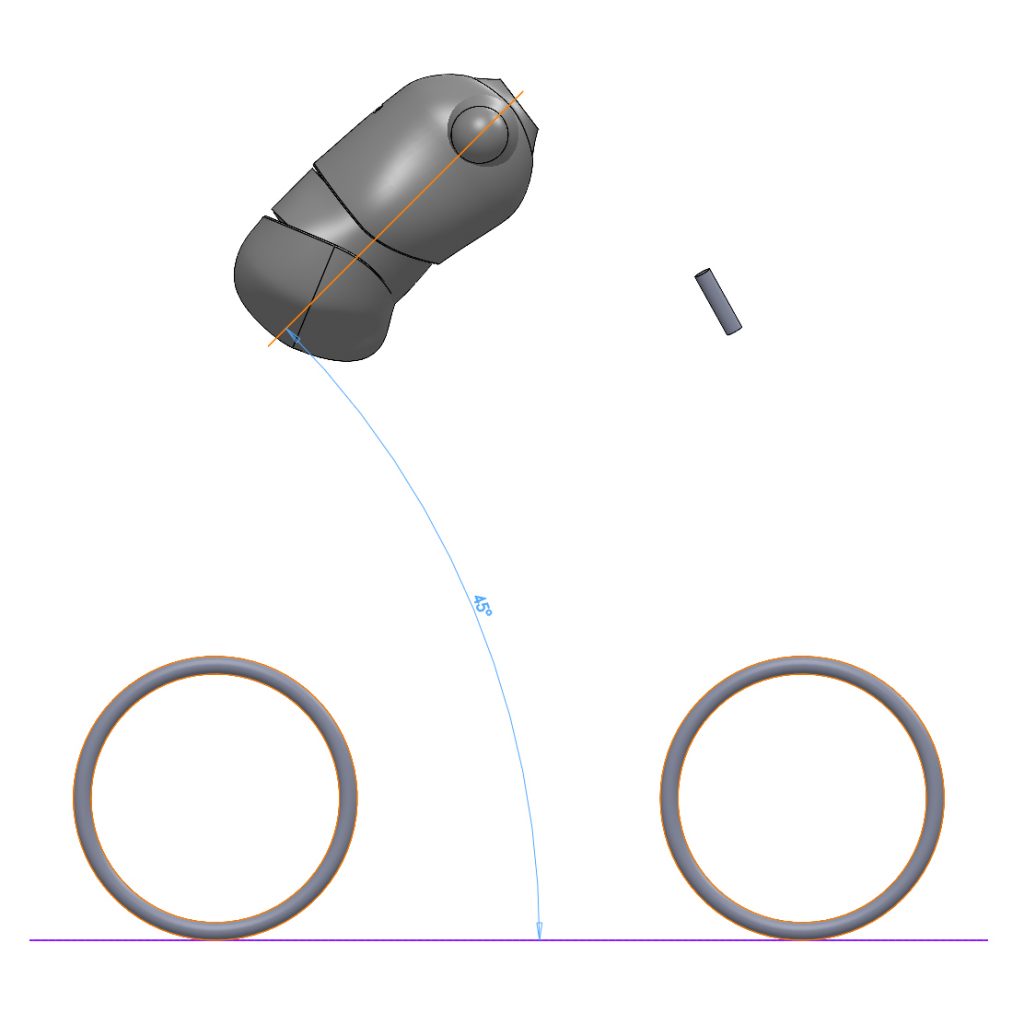
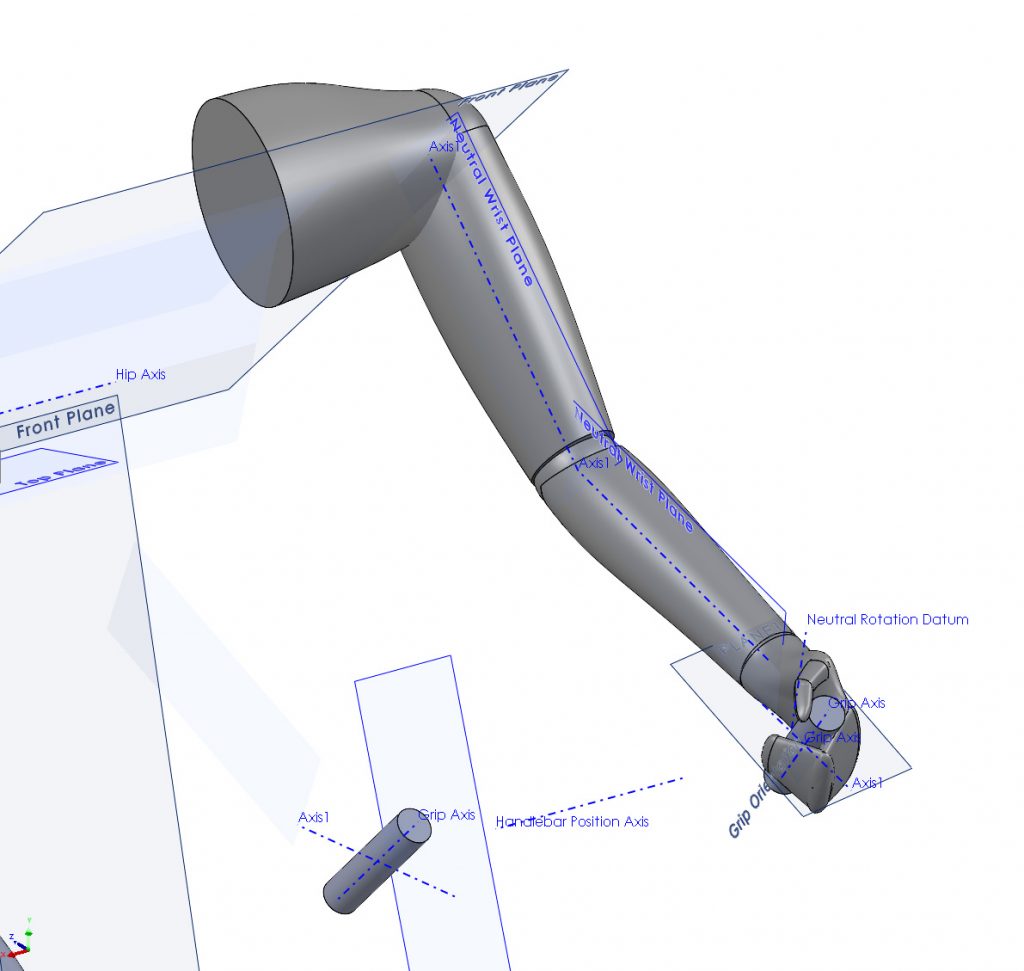
A further adjustment at the lower fork crown will allow the trail to be adjusted, without requiring a change in the steering angle. We’ll also be experimenting with some more unusual bicycle geometry adjustments, such as placing the front and rear wheels offset from the centerline. If our testing shows that this doesn’t have a negative impact on the handling of the bicycle, it could open up some useful options to achieve an even simpler folding action. The bike also uses an adjustable handlebar that will enable a wide range of riding positions and wrist angles.

The tubes sticking out from one side of the front wheel and the other side of the rear wheel are to test the effect of uneven luggage loading. Weights will be attached to these tubes to see how they affect the handling, helping us to specify the size of modular luggage attachements.
If you’d like to try riding with the different setups, why not sign-up for the test group and attend a test event in a city near you.